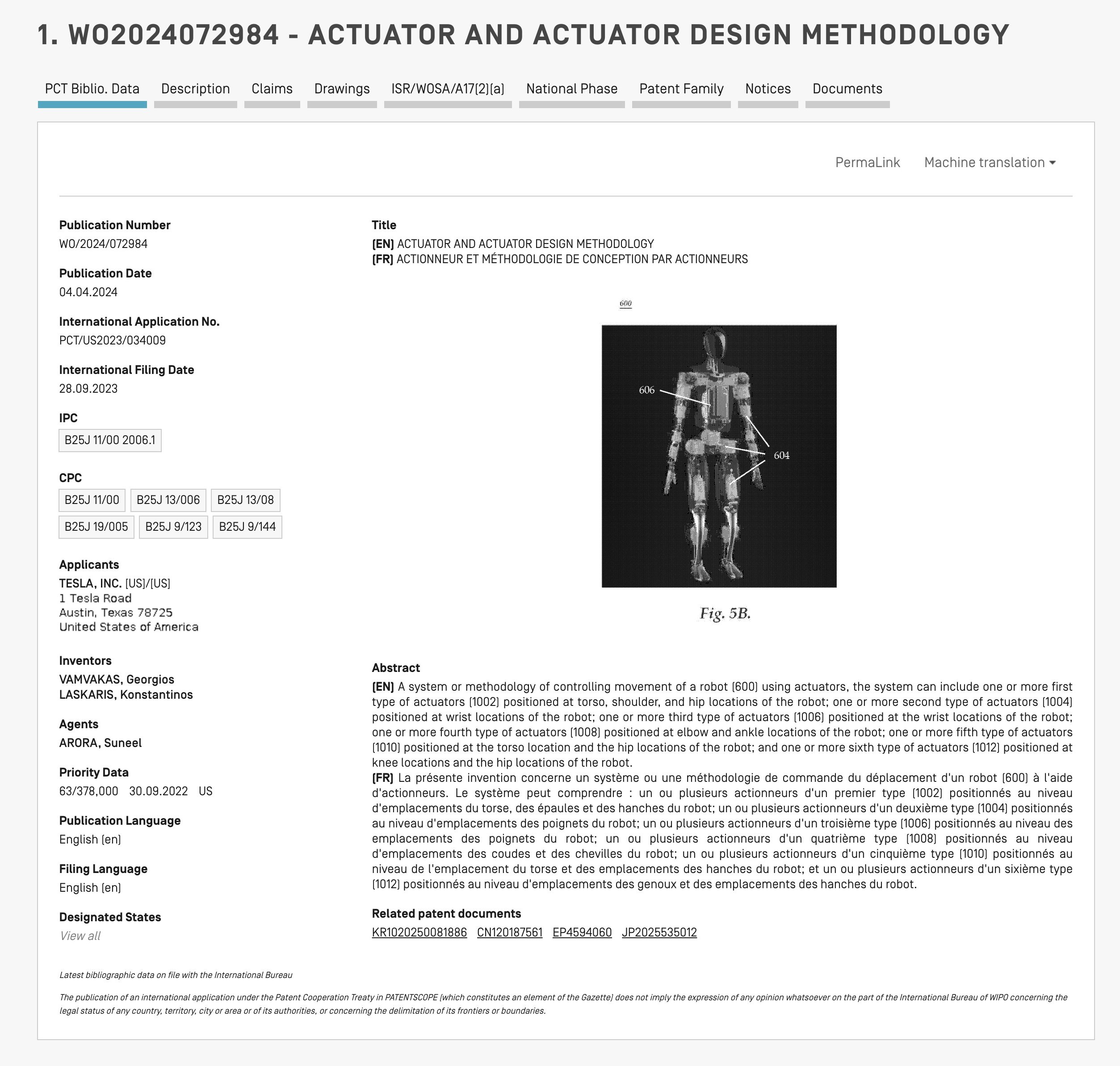
Oubliez les couvertures de science-fiction. Si vous retiriez la peau métallique d’un million d’humains synthétiques, que trouveriez-vous réellement pour les animer ? Ce n’est pas de la magie, mais un « hack » matériel radical détaillé dans le brevet WO 2024/072984 A1.
Alors que l’IA fait généralement la une des journaux, la véritable révolution réside ici dans l’Actionneur et sa méthodologie de conception. Cette technologie est vivante et évolue activement, comme le confirme la récente publication du dépôt européen EP4594060. Ce document est une preuve critique : il ne s’agit pas d’un concept poussiéreux, mais du plan d’ingénierie actif pour Optimus Gen 3.
En condensant la complexité infinie du mouvement humain en seulement six types d’actionneurs standardisés, Tesla a transformé un cauchemar d’ingénierie sur mesure en un produit de masse.
Vous avez un projet ?
Le cauchemar de l’ingénierie : Pourquoi les robots sont difficiles à construire
La réalité brutale de la robotique est que le corps humain est un désordre mécanique d’exigences contradictoires. Le couple massif nécessaire pour soulever une épaule est totalement différent de la délicate impulsion requise pour bouger un poignet. Traditionnellement, les ingénieurs résolvent ce problème en concevant un combo moteur/engrenage unique pour chaque articulation.
Le résultat ? Un suicide logistique. On se retrouve avec une machine composée de dizaines de pièces uniques, ce qui fait exploser les coûts et rend la maintenance impossible à grande échelle. Tesla a compris que pour construire des millions d’unités, l’approche « sur mesure » devait mourir.
La solution Tesla : Standardiser le chaos
La réponse de Tesla est une simplification impitoyable. Au lieu d’un moteur unique par articulation, ils ont consolidé l’anatomie entière du robot en six types d’actionneurs spécifiques (3 rotatifs et 3 linéaires). En cartographiant mathématiquement les profils de couple et de vitesse du corps humain, ils ont réalisé qu’ils pouvaient réutiliser le même matériel pour des fonctions totalement différentes.
La boîte à outils du mouvement : Les 6 types
| Type | Famille | Emplacement Clé | Fonction Principale |
| Type 1 | Rotatif | Épaule, Hanche, Torse | Le bourreau de travail pour les masses pivotantes lourdes. |
| Type 2 & 3 | Rotatif | Poignets | Haute précision et vitesse pour la dextérité fine. |
| Type 4 | Linéaire | Avant-bras, Mollet | Utilise le même matériel pour le « curl » du coude et la flexion de la cheville. |
| Type 5 & 6 | Linéaire | Cuisses, Genoux | Les centrales électriques pour le levage lourd et la stabilité du tronc. |
La « Sauce Secrète » : Ondes de déformation et vis à rouleaux
Les moteurs ne sont que le début ; l’engrenage est l’endroit où la magie opère.
- Strain Wave Gearing (Harmonic Drives) : Pour les articulations rotatives des bras, Tesla a choisi cette technologie pour son absence totale de « jeu » mécanique (backlash). C’est ce qui permet à Optimus d’être parfaitement stable lorsqu’il pointe un objet.
- Vis à rouleaux planétaires (Inverted Roller Screws) : Pour les jambes, Tesla utilise des vis à rouleaux plutôt que les vis à billes classiques des machines CNC. Elles offrent une surface de contact massive, permettant au robot d’absorber les chocs d’un saut ou d’un trébuchement sans briser ses composants.
Sentir le monde : Le contrôle d’impédance
Un robot qui se déplace aveuglément est dangereux. Le brevet souligne que ces actionneurs intègrent des capteurs de force et de couple sans contact directement sur les arbres de transmission. Cela permet le Contrôle d’Impédance. Le robot ne suit pas aveuglément un chemin de coordonnées qui pourrait écraser une main humaine ; il peut passer instantanément d’une rigidité totale (porter une boîte) à une souplesse de ressort (serrer une main).
Le Cerveau : Corriger la réalité en 4D
Le matériel standardisé est inutile sans un cerveau capable de comprendre le monde réel. Tesla utilise :
- Couche de rectification : Redresse mathématiquement les flux vidéo des caméras (souvent montées avec d’infimes inclinaisons) avant que l’IA ne les traite.
- BiFPN (Bidirectional Feature Pyramid Network) : Permet au robot de voir à plusieurs échelles simultanément : suivre une vis minuscule au sol tout en comprenant la géométrie globale de la pièce.
- Perception 4D : Grâce à un « Frame Selector Engine », le robot se souvient des 3 à 15 dernières secondes. Si vous passez derrière un pilier, il sait que vous êtes toujours là.
Conclusion : L’accélérateur de la production de masse
Ce brevet est bien plus qu’un document technique : c’est le manuel de fabrication d’Optimus Gen 3. En prouvant qu’un humanoïde fonctionnel peut être construit avec seulement six types d’actionneurs, Tesla brise la barrière des coûts qui maintenait les robots au rang de jouets de laboratoire à 100 000 $.
Cette architecture modulaire est la clé de la rumeur d’un prix de vente inférieur à 20 000 $. Tesla n’est pas seulement en train de construire un robot ; ils construisent la chaîne d’approvisionnement pour les « imprimer » par millions.